GWD
- CV
- 2021-07-28
- 582热度
- 0评论
Rethinking Rotated Object Detection with Gaussian Wasserstein Distance Loss
Introduction
旋转目标检测作者总结出来的难点有以下几点:
- loss和指标的不一致(loss可能没法反应出最终的指标效果)
- 边界的不连续性
- 边界框如果是正方形的话会影响最终的检测效果
这篇文章的主要贡献:
- 总结了关于旋转目标检测的三个难点
- 将GWD (Gaussian Wasserstein Distance)即推土机距离引入模型中
- 利用GWD去解决之前提到的问题
- 模型结果在众多数据集中取得了不错的表现
Rotated Object Regression Detector Revisit
首先基于角度回归分析旋转目标检测器的一些缺陷:
Bounding Box Definition
旋转目标利用角度回归的检测其中对于角度的处理通常有两种方法:
- opencv定义法\(D_{oc}\)
- 基于长边的定义方法\(D_{le}\)
$$
D_{le}(h_{le},w_{le},θ_{le})= \begin{cases} D_{oc}(h_{oc},w_{oc},θ_{oc}), & h_{oc}\ge w_{oc} \\ D_{oc} (w_{oc},h_{oc},θ_{oc}+90°), &\text{otherwise} \end{cases}
$$
$$
D_{oc}(h_{oc},w_{oc},θ_{oc})= \begin{cases} D_{le}(h_{le},w_{le},θ_{le}), & \theta_{le}\in [-90°, 0) \\ D_{le} (w_{le},h_{le},θ_{le}-90°), &\text{otherwise} \end{cases}
$$
作者在之前的论文中提出过使用角度回归的三个问题,分别为PoA(角度的周期性),EoE(边界的变换),square-like problem(长宽比接近带来的问题),如果使用的是长边定义法可以将边界变换的问题解决,但是治标不治本。
Inconsistency between Metric and Loss
通过列举不同IoUloss来说明旋转目标检测性能指标和loss会出现不一致的情况
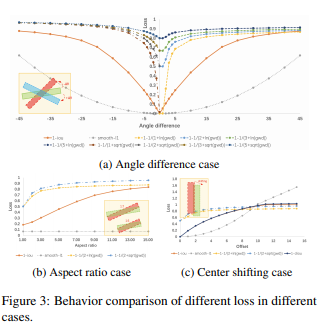
case1:比较IoU loss和smooth l1 loss 不仅可以看出loss和指标的不一致,还可以发现旋转目标的IoU loss确实不可导。
case2:比较IoU loss和smooth l1 loss 随着长宽比的增长smooth l1 loss却一直是常数常数但是IOU的增长趋势变化相对较大
case3:两者的loss单调性是一样的,但是高度不是完全一致。
Boundary Discontinuity and Square-Like Problem
开始介绍边界不连续和长宽比过于接近的问题:
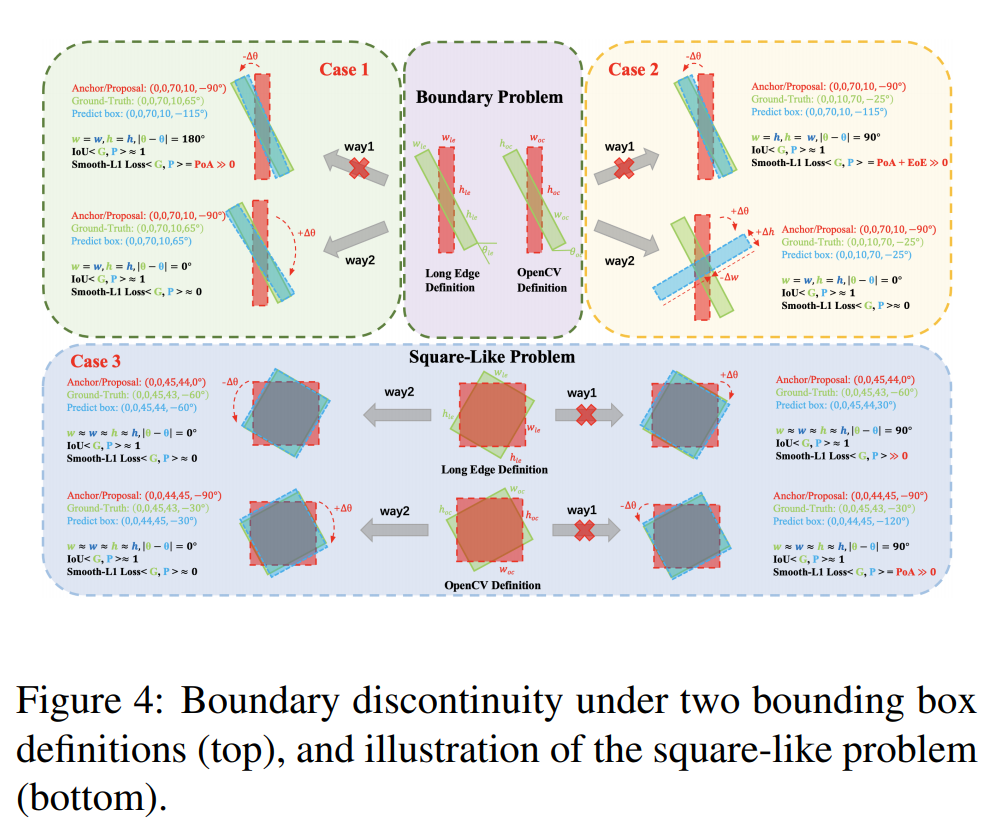
拿上图case2 opencv定义方法举例说明红色anchor/proposal(0,0,70,10,-90),绿色gt为(0,0,10,70,-25),那么模型可能很容易按照way1的方法去预测这样会出现PoA和EoE的问题,最终导致的结果就是实际loss过大,这种情况下模型的预测只能朝着way2的方向发展,这样会使得模型进行更为复杂的回归。
但是作者又指出 如果预定义的anchor/proposal不在角度边界处,那么way1不会出现太大的loss;除此之外,还需要分析一下square-like problem,在case3中,使用长边定义的方法红色anchor/proposal(0,0,45,44,0),绿色的gt为(0,0,45,43,-60)如果预测的蓝色box为(0,0,45,44,30)虽然效果上应该不会有太多问题,但是实际上仍然会有较大的loss值,所以在回归的时候还是需要绕一大圈让模型进行复杂的回归,这一问题不是由PoA或者EoE所引起的,而是由loss和指标的不连续性所引起的
The proposed Method
接下来要介绍的方法需要满足以下三个条件:
- IoU和指标的高度一致性
- 可以直接求导学习
- 在边界处平滑
Wasserstein Distance for Rotating Box
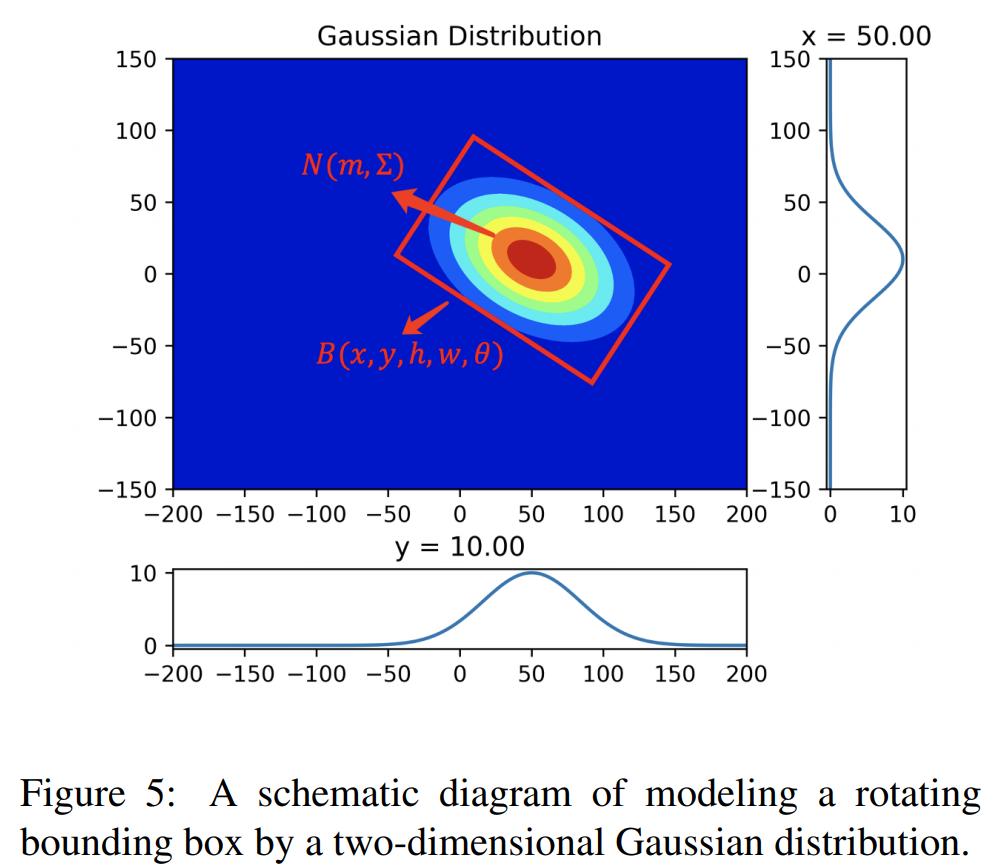
rotate box的高斯分布均值和方差如下所示:
$$
m=(x,y)\\ Σ^{1/2}=RSR^T= \begin{pmatrix} cos\theta & -sin\theta \\ sin\theta & cos\theta \end{pmatrix} \begin{pmatrix} w/2 & 0 \\ 0 & h/2 \end{pmatrix} \begin{pmatrix} cos\theta & sin\theta \\ -sin\theta & cos\theta \end{pmatrix} \\= \begin{pmatrix} \frac{w}{2}cos^2θ+\frac{h}{2}sin^2θ & \frac{w-h}{2}cos\theta sin\theta \\ \frac{w-h}{2}cos\theta sin\theta & \frac{w}{2}sin^2θ+\frac{h}{2}cos^2θ \end{pmatrix}
$$
其中R是旋转矩阵S表示特征值的对角矩阵
GWD的一般表达式为
$$
W(μ;v)≔infE(‖X−Y‖)^{1/2}
$$
两个分布均为正态分布,可以表示为:
$$
d^2=‖m_1−m_2 ‖_2^2+Tr(Σ_1+Σ_2−2(Σ_1^{1/2} Σ_2 Σ_1^{1/2})^{1/2})
$$
最终经过推导表达式可以写为
$$
d^2=l_2−norm([x_1,y_1,w_1/2,h_1/2]^T,[x_2,y_2,w_2/2,h_2/2]^T )
$$
Gaussian Wasserstein Distance Regression Loss
如果直接将该距离应用到损失函数中效果其实并不好(后续实验可以证明)所以利用IoU loss的形式加入到损失函数中:
$$
L_{gwd}=1−1/(τ+f(d^2 ) ), τ≥1
$$
其中f为非线性函数的功能为ln或者sqrt
到目前为止该损失函数满足上述三个条件中的前两个,为了满足第三个条件还需要发掘函数本身的三个定义:
$$
Property 1:Σ^{1/2} (w,hθ)=Σ^{1/2} (hw,θ−π/2)\\ Property 2:Σ^{1/2} (w,hθ)=Σ^{1/2} (w,h,θ−π)\\ Property 3:Σ^{1/2} (w,hθ)≈Σ^{1/2} (w,h,θ−π/2),if\quad w≈h
$$
由性质1可以发现不论是opencv定义法还是长边定义法在GWD loss中是等价的,所以不需要特别纠结角度的对应关系,所以GWD不需要特别绑定某一类的角度定义方法,并且根据这些性质可以发现它们可以有效的解决上述问题。
GWD的好处主要有:
- 让两个角度定义等价
- 使得rotate boxloss具有高度一致性
- 避免了常规的问题
Overall Loss Function Design
编码方式仍然是常规的编码方式
损失函数的总体表达式为:
$$
L=\frac{λ_1}{N} ∑_{n=1}^Nobj_n⋅L_{gwd} (b_n,gt_n)+\frac{λ_2}{N} ∑_{n=1}^NL_{cls} (p_n,t_n)
$$