ReDet
- CV
- 2021-08-15
- 191热度
- 0评论
ReDet: A Rotation-equivariant Detector for Aerial Object Detection
Introduction
contribution
- 提出了Rotation-equivariant检测器用于高质量的遥感图像目标检测
- 设计了一个RiRoI Align从旋转同变性特征中提取旋转不变性特征
论文里提到的方法如下图所示:
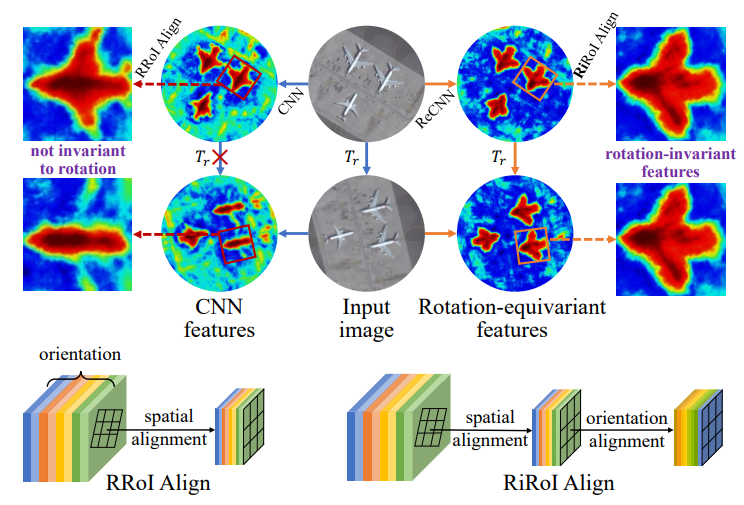
一共包含了两个部分:旋转同变性特征的提取和旋转不变性特征的提取
Preliminaries
同变性的等式可以列为:
$$
Φ[T_g^X (x)]=T_g^Y [Φ(x)]
$$
其中\(T_g\)表示在空间内相关操作,当所有的\(T_g^x\)和\(T_g^y\)都相同的时候同变性就成为了不变性。
而在卷积中的平移同变性可以用公式:
$$
[[T_t f]∗ψ](x)=[T_g [f∗ψ]](x)
$$
其中\(\psi:Z^2\rightarrow R^K\)代表的是卷积核并且\(*\)代表的是卷积操作,\(f\)代表的是特征图,\(T_t\)代表的是在空间上的相关操作
Rotation-equivariant Networks
旋转同变性网络和常规的CNN类似都是权重共享的,不论是平移的权重还是旋转的权重;假设在群G内\(\Phi=\{L_i|i\in\{1,2,...,M\}\}\)为一个有着M层旋转同变性的网络层,那么层\(L_i\in\Phi\)可以使旋转变化T_r得到保留\(L_i[T_r(g)]=T_r[L_i(g)],g\in G\)
整体的网络层可以表示为:
$$
[∏_{i=1}^ML_i ](T_r I)=T_r [∏_{i=1}^ML_i ](I)
$$
Rotation-invariant Networks
如果对于任何旋转变化,输入和输出的性质都保持相同,那么就可以认为输出特征具有旋转不变性,该特征主要可以分为图片级,实例级和像素级。
Rotation-equivariant Detector
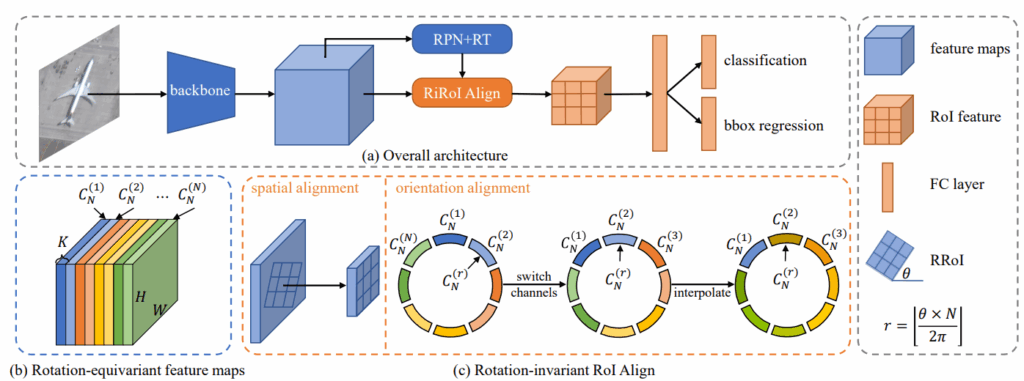
提出的架构整体如上图所示
Rotation-equivariant Backbone
仿照ResNet和FPN设计了ReResNet和ReFPN,基于e2cnn使用了旋转同变性的网络,不像传统网络该网络输出的特征图尺度为(K,N,H,W)有N个方向通道:
$$
f=\{f^{(i)}│i∈{1,2,…,N} \}
$$
每一个方向通道内,对应一个C_N元素。
该backbone的优点较为明显:
- 高度的权重共享
- 丰富方向信息
- 同计算量的情况下参数量更小
(ps:该backbone的主要两点就在于使用了e2cnn,但是e2cnn想要完全理解的话,必须得具有十分丰富的群论知识)
Rotation-invariant RoI Align
本次提出的RoI align方法除了继承RoI transformer的空间对齐同时还需要方向也对齐
具体来说对于输出的候选区域,方向对齐如下式表示:
$$
\hat{f}_R=Int(SC(f_R,r), θ),r=⌊θN/2π⌋
$$
其中SC和Int分别为交换通道和插值,对于候选区域的特征首先需要计算索引\(r\)将该索引对应的方向特征量提到最前面,但是一开始所设定的群都是离散的,如果角度并不在群内,那么需要离他最近的\(l\)个方向通道内的特征图进行插值。如果\(l\)为2话,插值公式为:
$$
\hat{f}_R^{(i)}=(1−α) f_R^{(i)}+αf_R^{(i+1)}\quad i∈[1,N]
$$
其中\(\alpha=\frac{\theta N}{2\pi}-r\)代表的是距离